GURI - Um robô móvel autônomo e inteligente
Universidade Federal de Santa Catarina
Departamento de Informática e Estatística
Curso de Ciência da Computação
Departamento de Informática e Estatística
Curso de Ciência da Computação
Autoras: Bárbara Louise Boff Josiane Milanez
Orientador: João Bosco da Mota Alves
Co-Orientador: Alex Moretti
Orientador: João Bosco da Mota Alves
Co-Orientador: Alex Moretti
Este trabalho apresenta o projeto de um robô móvel autônomo inteligente denominado GURI. Ele interage diretamente com seu ambiente de trabalho, através de sensores, usando princípio de percepção-ação.
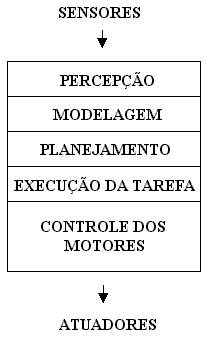
Foi escolhida para a implementação a arquitetura de assunção, sobre a qual é feito um estudo.
Para a percepção do robô foram escolhidos sensores de infra-vermelho, para desvio de obstáculos e alcance do objetivo (bateria), respectivamente.
A arquitetura de Subsumption foi primeiro introduzida por Rodney Brooks, a qual é uma implementação específica para robôs baseados em comportamento e na reestruturação da decomposição do problema em níveis funcionais. Ela refere-se à idéia de decomposição de controle baseado em comportamento, um sistema em camadas com as de mais alto nível sobrepondo as de nível menor, ou seja, uma ferramenta ou linguagem específica para se construir controladores de robôs móveis autônomos.Vídeo do GURI [download]
Fotos do GURI
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
[voltar]